2025-04-13 14:09:55 +08:00
|
|
|
|
# 高飞论文
|
|
|
|
|
|
|
2025-04-26 19:57:55 +08:00
|
|
|
|
## 证明特征值序列为平稳的时间序列
|
|
|
|
|
|
|
|
|
|
|
|
### 问题设定
|
|
|
|
|
|
|
|
|
|
|
|
- **研究对象**
|
|
|
|
|
|
设 $\{\lambda_1(A)_t\}_{t\in\mathbb Z}$ 是随时间变化的随机对称矩阵 $A_t$ 的最大特征值序列(如动态网络的邻接矩阵)。
|
|
|
|
|
|
- **目标**
|
|
|
|
|
|
证明 $\{\lambda_1(A)_t\}$ 是 **二阶(弱)平稳**的时间序列,即
|
|
|
|
|
|
1. $E[\lambda_1(A)_t]=\mu_1$(与 $t$ 无关);
|
|
|
|
|
|
2. $\operatorname{Var}[\lambda_1(A)_t]=\sigma_1^2<\infty$(与 $t$ 无关);
|
|
|
|
|
|
3. $\operatorname{Cov}(\lambda_1(A)_t,\lambda_1(A)_{t-k})=\gamma(k)$ 只依赖滞后 $k$。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### 关键假设
|
|
|
|
|
|
|
|
|
|
|
|
- **矩阵统计特性(引理 1)**
|
|
|
|
|
|
|
|
|
|
|
|
- $A_t$ 为 $N\times N$ 实对称随机矩阵;元素 $\{a_{ij}\}_{i\le j}$ 相互独立且有界:$|a_{ij}|\le K$。
|
|
|
|
|
|
|
|
|
|
|
|
- 非对角元素:$E[a_{ij}]=\mu>0,\ \operatorname{Var}(a_{ij})=\sigma^2$;对角元素:$E[a_{ii}]=v$。
|
|
|
|
|
|
|
|
|
|
|
|
- $N$ 足够大时
|
|
|
|
|
|
$$
|
|
|
|
|
|
E[\lambda_1(A_t)]\approx(N-1)\mu+v+\tfrac{\sigma^2}{\mu}\equiv\mu_1,\qquad
|
|
|
|
|
|
\operatorname{Var}[\lambda_1(A_t)]\approx2\sigma^2\equiv\sigma_1^2 .
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
说明:
|
|
|
|
|
|
|
|
|
|
|
|
- **$\sigma^2$**
|
|
|
|
|
|
这是随机矩阵 $A_t$ 的非对角线元素 $a_{ij}$ ($i \neq j$) 的方差,即
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{Var}(a_{ij}) = \sigma^2.
|
|
|
|
|
|
$$
|
|
|
|
|
|
根据引理1的假设,所有非对角线元素独立同分布,均值为 $\mu$,方差为 $\sigma^2$。
|
|
|
|
|
|
|
|
|
|
|
|
- **$\sigma_1^2$**
|
|
|
|
|
|
这是最大特征值 $\lambda_1(A_t)$ 的方差,即
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{Var}[\lambda_1(A_t)] \equiv \sigma_1^2.
|
|
|
|
|
|
$$
|
|
|
|
|
|
当 $N$ 足够大时,$\sigma_1^2$ 近似为 $2\sigma^2$。
|
|
|
|
|
|
|
|
|
|
|
|
- **时间序列模型**
|
|
|
|
|
|
对**去中心化序列**
|
|
|
|
|
|
$$
|
|
|
|
|
|
\tilde z_t:=\lambda_1(A)_t-\mu_1
|
|
|
|
|
|
$$
|
|
|
|
|
|
假设其服从 AR(1)
|
|
|
|
|
|
$$
|
|
|
|
|
|
\tilde z_t=\rho\,\tilde z_{t-1}+\varepsilon_t,\qquad
|
|
|
|
|
|
\varepsilon_t\stackrel{\text{i.i.d.}}{\sim}\text{WN}(0,\sigma_\varepsilon^{2}),\ \ |\rho|<1,
|
|
|
|
|
|
$$
|
|
|
|
|
|
且 $\varepsilon_t$ 与历史 $\{\tilde z_{s}\}_{s<t}$ 独立。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### 证明主特征值序列平稳
|
|
|
|
|
|
|
|
|
|
|
|
#### **(1) 均值恒定性的推导**
|
|
|
|
|
|
|
|
|
|
|
|
- 去中心化后 $E[\tilde z_t]=0$。因此
|
|
|
|
|
|
$$
|
|
|
|
|
|
E[\lambda_1(A)_t]=E[\tilde z_t]+\mu_1=\mu_1,
|
|
|
|
|
|
$$
|
|
|
|
|
|
与 $t$ 无关,满足第一条。
|
|
|
|
|
|
|
|
|
|
|
|
#### (2) 方差恒定
|
|
|
|
|
|
|
|
|
|
|
|
AR(1)模型定义为:
|
|
|
|
|
|
$$
|
|
|
|
|
|
z_t = \rho z_{t-1} + \varepsilon_t
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\begin{aligned}
|
|
|
|
|
|
z_t &= \varepsilon_t + \rho z_{t-1} \\
|
|
|
|
|
|
&= \varepsilon_t + \rho (\varepsilon_{t-1} + \rho z_{t-2}) \\
|
|
|
|
|
|
&= \varepsilon_t + \rho \varepsilon_{t-1} + \rho^2 \varepsilon_{t-2} + \cdots \\
|
|
|
|
|
|
&= \sum_{j=0}^\infty \rho^j \varepsilon_{t-j}
|
|
|
|
|
|
\end{aligned}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{Var}(z_t) = \text{Var}\left( \sum_{j=0}^\infty \rho^j \varepsilon_{t-j} \right)= \sum_{j=0}^\infty \rho^{2j} \text{Var}(\varepsilon_{t-j})
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
由于$\text{Var}(\varepsilon_{t-j}) = \sigma_\varepsilon^2$ 对所有 $j$ 成立,
|
|
|
|
|
|
$$
|
|
|
|
|
|
= \sigma_\varepsilon^2 \sum_{j=0}^\infty \rho^{2j}=\frac{\sigma_\varepsilon^2}{1-\rho^2}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
- **$|\rho| < 1$** 是保证级数收敛和方差有限的充要条件。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
根据引理1,$\text{Var}[\lambda_1(A_t)] \approx 2\sigma^2 = \sigma_1^2$。为使模型与理论一致,可设:
|
|
|
|
|
|
$$
|
|
|
|
|
|
\sigma_\varepsilon^2 = (1 - \rho^2) \cdot 2\sigma^2
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
此时:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{Var}[\tilde{z}_t] = 2\sigma^2 = \sigma_1^2
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
#### **(3) 协方差仅依赖滞后 $k$**
|
|
|
|
|
|
|
|
|
|
|
|
对 $k\ge0$,
|
|
|
|
|
|
$$
|
|
|
|
|
|
\gamma(k):=\operatorname{Cov}(\tilde z_t,\tilde z_{t-k})
|
|
|
|
|
|
=\rho^{k}\sigma_{\tilde z}^{2},
|
|
|
|
|
|
$$
|
|
|
|
|
|
仅含 $k$ 而与 $t$ 无关;于是
|
|
|
|
|
|
$$
|
|
|
|
|
|
\operatorname{Cov}(\lambda_1(A)_t,\lambda_1(A)_{t-k})=\gamma(k),
|
|
|
|
|
|
$$
|
|
|
|
|
|
满足第三条。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
#### (4) 平稳性的核心条件
|
|
|
|
|
|
|
|
|
|
|
|
1. **|ρ| < 1 是关键条件**
|
|
|
|
|
|
- 直观上:$\rho$ 越小,当前特征值对过去的依赖越弱;
|
|
|
|
|
|
- $\rho=\pm1$ 会让方差发散,不可能稳态。
|
|
|
|
|
|
2. **噪声独立性**:$\varepsilon_t$ 为白噪声,确保新信息与历史无关。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2025-05-24 21:15:55 +08:00
|
|
|
|
### 证明剩余特征值平稳(大模型说不可取):
|
2025-04-26 19:57:55 +08:00
|
|
|
|
|
|
|
|
|
|
#### 1. 收缩操作(Deflation)的严格定义
|
|
|
|
|
|
|
|
|
|
|
|
设 $A_t$ 的谱分解为:
|
|
|
|
|
|
$$
|
|
|
|
|
|
A_t = \sum_{i=1}^N \lambda_i u_i u_i^\top,
|
|
|
|
|
|
$$
|
|
|
|
|
|
其中 $\lambda_1 \geq \lambda_2 \geq \dots \geq \lambda_N$,且 $\{u_i\}$ 是标准正交基。
|
|
|
|
|
|
|
|
|
|
|
|
- **第一次收缩**:
|
|
|
|
|
|
定义剩余矩阵 $A_{t,2} = A_t - \lambda_1 u_1 u_1^\top$,其性质为:
|
|
|
|
|
|
|
|
|
|
|
|
- 特征值:$\lambda_2, \lambda_3, \dots, \lambda_N$(即移除 $\lambda_1$ 后剩余特征值不变)。
|
|
|
|
|
|
- 特征向量:$u_2, \dots, u_N$ 保持不变(因 $u_1$ 与其他特征向量正交)。
|
|
|
|
|
|
|
|
|
|
|
|
- **第 $k$ 次收缩**:
|
|
|
|
|
|
递归定义:
|
|
|
|
|
|
$$
|
|
|
|
|
|
A_{t,k+1} = A_{t,k} - \lambda_k u_k u_k^\top,
|
|
|
|
|
|
$$
|
|
|
|
|
|
剩余矩阵 $A_{t,k+1}$ 的特征值为 $\lambda_{k+1}, \dots, \lambda_N$。
|
|
|
|
|
|
|
|
|
|
|
|
每次收缩移除当前主成分,剩余矩阵的特征值是原始矩阵中未被移除的部分。
|
|
|
|
|
|
|
|
|
|
|
|
---
|
|
|
|
|
|
|
|
|
|
|
|
#### 2. 剩余特征值的统计特性
|
|
|
|
|
|
|
|
|
|
|
|
**目标**:证明 $\{\lambda_k(A_t)\}_{t \in \mathbb{Z}}$ 对 $k \geq 2$ 也是弱平稳的。
|
|
|
|
|
|
|
|
|
|
|
|
##### **(1) 均值恒定性**
|
|
|
|
|
|
|
|
|
|
|
|
- **剩余矩阵的期望**:
|
|
|
|
|
|
由线性性:
|
|
|
|
|
|
$$
|
|
|
|
|
|
E[A_{t,k+1}] = E[A_t] - \sum_{i=1}^k E[\lambda_i u_i u_i^\top].
|
|
|
|
|
|
$$
|
|
|
|
|
|
若 $A_t$ 的元素分布时不变,且 $\lambda_i$ 和 $u_i$ 的期望稳定(由主特征值的平稳性保证),则 $E[A_{t,k+1}]$ 与 $t$ 无关。
|
|
|
|
|
|
|
|
|
|
|
|
- **特征值期望**:
|
|
|
|
|
|
对剩余矩阵 $A_{t,k+1}$,其主特征值 $\lambda_{k+1}(A_t)$ 的期望近似为:
|
|
|
|
|
|
$$
|
|
|
|
|
|
E[\lambda_{k+1}(A_t)] \approx (N-k-1)\mu + v + \frac{\sigma^2}{\mu} \equiv \mu_{k+1},
|
|
|
|
|
|
$$
|
|
|
|
|
|
其中 $(N-k-1)\mu$ 是剩余非对角元素的贡献(假设每次收缩后非对角元素统计特性不变)。
|
|
|
|
|
|
|
|
|
|
|
|
##### **(2) 方差恒定性**
|
|
|
|
|
|
|
|
|
|
|
|
- **剩余矩阵的方差**:
|
|
|
|
|
|
收缩操作通过正交投影移除 $\lambda_k u_k u_k^\top$,因此剩余矩阵 $A_{t,k+1}$ 的元素方差仍为 $\sigma^2$(对角元素可能需调整)。
|
|
|
|
|
|
由引理1的推广:
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{Var}[\lambda_{k+1}(A_t)] \approx 2\sigma^2 \equiv \sigma_{k+1}^2.
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
- **动态模型**:
|
|
|
|
|
|
假设去中心化序列 $\tilde{z}_{k+1,t} = \lambda_{k+1}(A_t) - \mu_{k+1}$ 服从AR(1):
|
|
|
|
|
|
$$
|
|
|
|
|
|
\tilde{z}_{k+1,t} = \rho_{k+1} \tilde{z}_{k+1,t-1} + \varepsilon_{k+1,t}, \quad |\rho_{k+1}| < 1,
|
|
|
|
|
|
$$
|
|
|
|
|
|
稳态方差为:
|
|
|
|
|
|
$$
|
|
|
|
|
|
\sigma_{\tilde{z}_{k+1}}^2 = \frac{\sigma_{\varepsilon_{k+1}}^2}{1-\rho_{k+1}^2} = \sigma_{k+1}^2.
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
##### **(3) 协方差仅依赖滞后 $m$**
|
|
|
|
|
|
|
|
|
|
|
|
- 协方差函数:
|
|
|
|
|
|
$$
|
|
|
|
|
|
\gamma_{k+1}(m) = \text{Cov}(\tilde{z}_{k+1,t}, \tilde{z}_{k+1,t-m}) = \rho_{k+1}^{|m|} \sigma_{\tilde{z}_{k+1}}^2.
|
|
|
|
|
|
$$
|
|
|
|
|
|
仅依赖 $m$,与 $t$ 无关。
|
|
|
|
|
|
|
|
|
|
|
|
---
|
|
|
|
|
|
|
|
|
|
|
|
#### **3. 递推证明的完整性**
|
|
|
|
|
|
|
|
|
|
|
|
1. **归纳基础**:
|
|
|
|
|
|
$k=1$ 时(主特征值),平稳性已证。
|
|
|
|
|
|
|
|
|
|
|
|
2. **归纳假设**:
|
|
|
|
|
|
假设 $\lambda_k(A_t)$ 的平稳性成立,即:
|
|
|
|
|
|
- $E[\lambda_k(A_t)] = \mu_k$(常数),
|
|
|
|
|
|
- $\text{Var}[\lambda_k(A_t)] = \sigma_k^2$(有限),
|
|
|
|
|
|
- $\text{Cov}(\lambda_k(A_t), \lambda_k(A_{t-m})) = \gamma_k(m)$。
|
|
|
|
|
|
|
|
|
|
|
|
3. **归纳步骤**:
|
|
|
|
|
|
- 通过收缩操作,$\lambda_{k+1}(A_t)$ 成为 $A_{t,k+1}$ 的主特征值。
|
|
|
|
|
|
- 若 $A_{t,k+1}$ 满足与 $A_t$ 相同的统计假设(独立性、有界性、时不变性),则 $\lambda_{k+1}(A_t)$ 的平稳性可类比主特征值的证明。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2025-05-24 21:15:55 +08:00
|
|
|
|
## JB-test
|
|
|
|
|
|
|
|
|
|
|
|
**JB-test(Jarque-Bera test)** 是一种用于检验样本数据是否服从正态分布的统计假设检验方法。这个检验特别适用于判断数据的偏度(skewness)和峰度(kurtosis)是否符合正态分布的特性。
|
|
|
|
|
|
|
|
|
|
|
|
正态分布具有以下特性:
|
|
|
|
|
|
|
|
|
|
|
|
- **偏度(Skewness)** 为 $0$,表示数据的分布是对称的。
|
|
|
|
|
|
- **峰度(Kurtosis)** 为 $3$,表示数据的峰度是"中等"的。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### JB-test的统计量
|
|
|
|
|
|
|
|
|
|
|
|
Jarque-Bera统计量的计算公式为:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
JB = \frac{n}{6} \left( S^2 + \frac{(K - 3)^2}{4} \right)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
其中:
|
|
|
|
|
|
|
|
|
|
|
|
- $n$ 是样本的大小。
|
|
|
|
|
|
- $S$ 是样本的偏度(skewness),衡量分布的对称性。
|
|
|
|
|
|
- $K$ 是样本的峰度(kurtosis),衡量分布的尖峭程度。
|
|
|
|
|
|
|
|
|
|
|
|
### JB-test的分布和检验步骤
|
|
|
|
|
|
|
|
|
|
|
|
- **零假设($H_0$)**:数据服从正态分布。
|
|
|
|
|
|
- **备择假设($H_1$)**:数据不服从正态分布。
|
|
|
|
|
|
|
|
|
|
|
|
在进行检验时,首先计算 JB 统计量,然后将其与卡方分布进行比较:
|
|
|
|
|
|
|
|
|
|
|
|
- JB 统计量的分布近似于自由度为 $2$ 的卡方分布(当样本量较大时)。
|
|
|
|
|
|
- 如果 JB 统计量的值大于临界值(根据设定的显著性水平,比如 $0.05$),则拒绝零假设,即认为数据不符合正态分布。
|
|
|
|
|
|
- 如果 JB 统计量的值小于临界值,则无法拒绝零假设,即认为数据服从正态分布。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### 结论
|
|
|
|
|
|
|
|
|
|
|
|
- **如果 JB 统计量接近 $0$**,说明数据的偏度和峰度与正态分布的期望非常接近,数据可能符合正态分布。
|
|
|
|
|
|
- **如果 JB 统计量远离 $0$**,则说明数据的偏度或峰度与正态分布的特征差异较大,数据不符合正态分布。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
## 特征值精度预估
|
|
|
|
|
|
|
|
|
|
|
|
卡尔曼滤波的状态更新方程为 $x_k' = x_k + K (z_k - H x_k)$,如果增益系数 $K$ 变小,那么先验预测 $x_k$ 接近真实值;反之如果增益系数 $K$ 变大,则测量值 $z_k$ 更接近真实值。增益系数$K$受到过程噪声$Q$以及观测噪声$R$的影响,因此估算的过程噪声$Q$和观测噪声$R$,与实际值是否一致,将决定$K$是否准确,从而影响滤波的精度。
|
|
|
|
|
|
|
|
|
|
|
|
设过程噪声$Q$的期望为$\mu_q$,方差为$\sigma_q$;观测噪声$R$的期望为$\mu_r$,方差为$\sigma_r$。其中$\mu_q$、$\sigma_q$和$\mu_r$、$\sigma_r$时未知;$n_q$、$n_r$分别为过程噪声与观测噪声的采样长度。
|
|
|
|
|
|
|
|
|
|
|
|
针对我们研究对象,特征值滤波公式的系数都属于实数域。$P_{k-1}$是由上次迭代产生,因此可以$FP_{k-1}F^T$看作定值,则$P_k$的方差等于$Q$的方差,即:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{var}(P_k) = \text{var}(Q)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
对卡尔曼增益$K$进行变换可得:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
K = \frac{1}{H + (H^T)^{-1} \cdot \left(\frac{R}{P_k}\right)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
且方差满足:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
D\left(\frac{R}{P_k}\right) = \frac{\sigma_r}{\sigma_q}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
其中:
|
|
|
|
|
|
|
|
|
|
|
|
- $H$ 为观测矩阵
|
|
|
|
|
|
- $(H^T)^{-1}$ 表示观测矩阵转置的逆
|
|
|
|
|
|
- $\sigma_r$, $\sigma_q$ 分别为观测噪声和过程噪声的标准差
|
|
|
|
|
|
|
|
|
|
|
|
设$\{Q_1, Q_2, \cdots, Q_m\}$是属于$\{Q\}$的一组样本,$\{R_1, R_2, \cdots, R_n\}$是属于$\{R\}$的一组样本,由于过程噪声$Q$与观测噪声$R$都满足高斯分布则可知如下卡方分布:
|
|
|
|
|
|
$$
|
|
|
|
|
|
\sum_{i=1}^{n_q} \left( \frac{Q_i - \overline{Q}}{\sigma_q} \right)^2 \sim \chi^2(n_q - 1) \quad \text{(2-21)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\sum_{i=1}^{n_r} \left( \frac{R_i - \overline{R}}{\sigma_r} \right)^2 \sim \chi^2(n_r - 1) \quad \text{(2-22)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
对两式作变形可得$F$分布:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\frac{\chi^{2}(n_{q})/(n_{q}-1)}{\chi^{2}(n_{r})/(n_{r}-1)} \sim F(n_{q}-1,n_{r}-1) \quad \text{(2-23)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
观测噪声$Q$和过程噪声$R$比值$\sigma_{r}/\sigma_{q}$的区间估计满足:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\frac{S_{q}^{*2}\sigma_{r}^{2}}{S_{r}^{*2}\sigma_{q}^{2}} \sim F(n_{q}-1,n_{r}-1)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
其中:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
S_{q}^{*2} = \frac{1}{n_{q}-1}\sum_{i=1}^{n_{q}}(Q_{i}-\overline{Q})^{2} \quad \text{(2-24)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
S_{r}^{*2} = \frac{1}{n_{r}-1}\sum_{i=1}^{n_{r}}(R_{i}-\overline{R})^{2} \quad \text{(2-25)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
对于置信度为$1-\alpha$的情况:
|
|
|
|
|
|
$$
|
|
|
|
|
|
P\left\{F_{1-\alpha/2}(n_q-1,n_r-1) \leq \frac{S_{q}^{*2}\sigma_{r}^{2}}{S_{r}^{*2}\sigma_{q}^{2}} \leq F_{\alpha/2}(n_q-1,n_r-1)\right\}=1-\alpha \quad \text{(2-26)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
于是可以得到:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
P\left\{F_{1-\alpha/2}(n_q-1,n_r-1)\frac{S_{r}^{*2}}{S_{q}^{*2}} \leq \frac{\sigma_{r}^{2}}{\sigma_{q}^{2}} \leq F_{\alpha/2}(n_q-1,n_r-1)\frac{S_{r}^{*2}}{S_{q}^{*2}}\right\}=1-\alpha \quad \text{(2-27)}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
我们采用绝对误差来进行精度分析,设$\xi$为绝对误差上限,即:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\text{MSE}(\hat{x} - x) \leq \xi
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
则有:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
\xi = \left( \frac{1}{c + m\theta_{min}} - \frac{1}{c + m\theta_{max}} \right) E\left( x_k' - x_k \right)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
= \frac{m\left( \theta_{max} - \theta_{min} \right)}{(c + m\theta_{min}) \left( c + m\theta_{max} \right)} E\left( x_k' - x_k \right) \quad(2-28)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
当$cm=1$时,可得:
|
|
|
|
|
|
|
|
|
|
|
|
$$
|
|
|
|
|
|
= \frac{(\theta_{max} - \theta_{min}) E \left( x_k' - x_k \right)}{(c^2 + \theta_{min}) (c^2 + \theta_{max})}
|
|
|
|
|
|
|
|
|
|
|
|
\quad(2-29)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
其中 $\theta_{min} = \left( F_{1-\alpha/2}(n_q - 1, n_r - 1) \frac{S_r^*}{S_q^*} \right)^{1/2}$,$\theta_{max} = \left( F_{\alpha/2}(n_q - 1, n_r - 1) \frac{S_r^*}{S_q^*} \right)^{1/2}$
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
根据上述推导,在获得预测模型的过程噪声与观测噪声后,可以根据区间估计的方法进行误差上界预估。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2025-04-13 14:09:55 +08:00
|
|
|
|
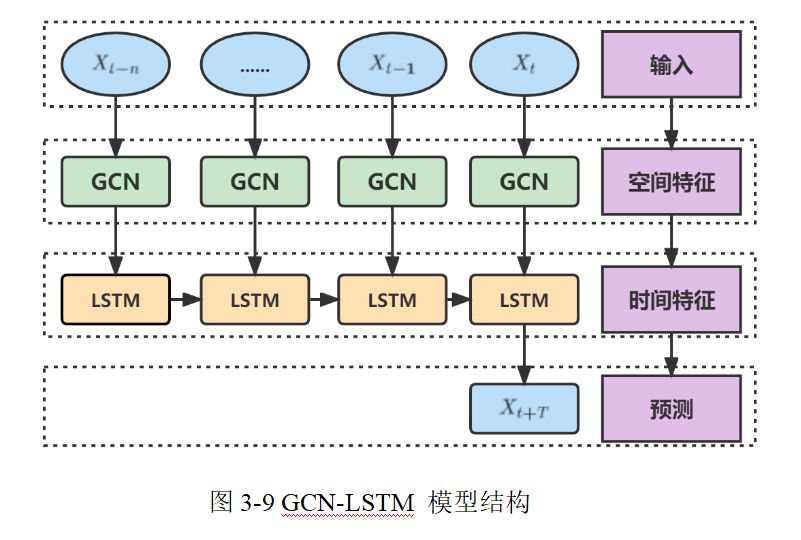
## 基于时空特征的节点位置预测
|
|
|
|
|
|
|
|
|
|
|
|
在本模型中,整个预测流程分为两大模块:
|
|
|
|
|
|
|
|
|
|
|
|
- **GCN 模块:主要用于从当前网络拓扑中提取每个节点的**空间表示**。这里的输入主要包括:
|
|
|
|
|
|
- **邻接矩阵 $A$**:反映网络中节点之间的连通关系,维度为 $N \times N$,其中 $N$ 表示节点数。(可通过第二章网络重构的方式获取)
|
|
|
|
|
|
- **特征矩阵 $H^{(0)}$**:一般是原始节点的属性信息,如历史位置数据,其维度为 $N \times d$,其中 $d$ 是初始特征维度。
|
|
|
|
|
|
|
|
|
|
|
|
- **LSTM 模块**:用于捕捉节点随时间变化的动态信息,对每个节点的历史运动轨迹进行序列建模,并预测未来时刻的坐标。
|
|
|
|
|
|
其输入通常是经过 GCN 模块处理后,每个节点在一段时间内获得的时空融合特征序列,维度一般为 $N \times T \times d'$,其中 $T$ 表示时间步数,$d'$ 是经过 GCN 后的特征维度。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### GCN 模块
|
|
|
|
|
|
|
|
|
|
|
|
#### 输入
|
|
|
|
|
|
|
|
|
|
|
|
- **邻接矩阵 $A$**:维度 $N \times N$。在实际操作中,通常先加上自环形成
|
|
|
|
|
|
$$
|
|
|
|
|
|
\hat{A} = A + I.
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
- **特征矩阵 $H^{(0)}$**:维度 $N \times d$,每一行对应一个节点的初始特征(例如历史采样的位置信息或其他描述)。
|
|
|
|
|
|
|
|
|
|
|
|
#### 图卷积操作
|
|
|
|
|
|
|
|
|
|
|
|
常用的图卷积计算公式为:
|
|
|
|
|
|
$$
|
|
|
|
|
|
H^{(l+1)} = \sigma \Bigl(\tilde{D}^{-1/2}\tilde{A}\tilde{D}^{-1/2} H^{(l)} W^{(l)} \Bigr)
|
|
|
|
|
|
$$
|
|
|
|
|
|
其中:
|
|
|
|
|
|
|
|
|
|
|
|
- $\tilde{A} = A + I$ 为加上自环后的邻接矩阵,
|
|
|
|
|
|
- $\tilde{D}$ 为 $\tilde{A}$ 的度矩阵,定义为 $\tilde{D}_{ii} = \sum_{j}\tilde{A}_{ij}$;
|
|
|
|
|
|
- $H^{(l)}$ 表示第 $l$ 层的节点特征,初始时 $H^{(0)}$ 就是输入特征矩阵;
|
|
|
|
|
|
- $W^{(l)}$ 是第 $l$ 层的权重矩阵,其维度通常为 $d_l \times d_{l+1}$(例如从 $d$ 到 $d'$);
|
|
|
|
|
|
- $\sigma(\cdot)$ 是非线性激活函数,例如 ReLU 或 tanh。
|
|
|
|
|
|
|
|
|
|
|
|
经过一层或多层图卷积后,可以得到最终的节点表示矩阵 $H^{(L)}$(或记为 $X$),维度为 $N \times d'$。
|
|
|
|
|
|
其中:
|
|
|
|
|
|
|
|
|
|
|
|
- 每一行 $x_i \in \mathbb{R}^{d'}$ 表示节点 $i$ 的空间特征,这些特征综合反映了其在网络拓扑中的位置及与邻居的关系。
|
|
|
|
|
|
|
|
|
|
|
|
#### 输出
|
|
|
|
|
|
|
|
|
|
|
|
- **GCN 输出**:形状为 $N \times d'$;若将模型用于时序建模,则对于每个时间步,都可以得到这样一个节点特征表示。
|
|
|
|
|
|
- 这里 $d'>d$ 。1.高维嵌入不仅保留了绝对位置信息,还包括了网络拓扑信息。2.兼容下游LSTM任务需求。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### LSTM 模块
|
|
|
|
|
|
|
|
|
|
|
|
#### 输入数据构造
|
|
|
|
|
|
|
|
|
|
|
|
在时序预测中,对于每个节点,我们通常有一段历史数据序列。假设我们采集了最近 $T$ 个时刻的数据,然后采用“滑动窗口”的方式,预测 $T+1$、 $T+2$...
|
|
|
|
|
|
|
|
|
|
|
|
- 对于每个时刻 $t$,节点 $i$ 的空间特征 $x_i^{(t)} \in \mathbb{R}^{d'}$ 由 GCN 得到;
|
|
|
|
|
|
|
|
|
|
|
|
- 将这些特征按照时间顺序排列,得到一个序列:
|
|
|
|
|
|
$$
|
|
|
|
|
|
X_i = \bigl[ x_i^{(t-T+1)},\, x_i^{(t-T+2)},\, \dots,\, x_i^{(t)} \bigr] \quad \in \mathbb{R}^{T \times d'}.
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
对于整个网络来说,可以将数据看作一个三维张量,维度为 $(N, T, d')$。
|
|
|
|
|
|
|
|
|
|
|
|
#### LSTM 内部运作
|
|
|
|
|
|
|
|
|
|
|
|
LSTM 通过内部门控机制(遗忘门 $f_t$、输入门 $i_t$ 和输出门 $o_t$)来更新其记忆状态 $C_t$ 和隐藏状态 $h_t$。公式如下
|
|
|
|
|
|
|
|
|
|
|
|
- **遗忘门**:
|
|
|
|
|
|
$$
|
|
|
|
|
|
f_t = \sigma(W_f [h_{t-1},\, x_t] + b_f)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
- **输入门和候选记忆**:
|
|
|
|
|
|
$$
|
|
|
|
|
|
i_t = \sigma(W_i [h_{t-1},\, x_t] + b_i) \quad,\quad \tilde{C}_t = \tanh(W_C [h_{t-1},\, x_t] + b_C)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
- **记忆更新**:
|
|
|
|
|
|
$$
|
|
|
|
|
|
C_t = f_t \odot C_{t-1} + i_t \odot \tilde{C}_t
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
- **输出门和隐藏状态**:
|
|
|
|
|
|
$$
|
|
|
|
|
|
o_t = \sigma(W_o [h_{t-1},\, x_t] + b_o), \quad h_t = o_t \odot \tanh(C_t)
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
其中,$x_t$ 在这里对应每个节点在时刻 $t$ 的 GCN 输出特征;
|
|
|
|
|
|
$[h_{t-1},\, x_t]$ 为连接后的向量;
|
|
|
|
|
|
|
|
|
|
|
|
LSTM 的隐藏状态 $h_i \in \mathbb{R}^{d'' \times 1}$(其中 $d''$ 为 LSTM 的隐藏单元数)捕捉了时间上的依赖信息。
|
|
|
|
|
|
|
|
|
|
|
|
#### 输出与预测
|
|
|
|
|
|
|
|
|
|
|
|
最后,经过 LSTM 处理后,我们在最后一个时间步获得最终的隐藏状态 $h_t$ 或使用整个序列的输出;接着通过一个全连接层(FC层)将隐藏状态映射到最终的预测输出。
|
|
|
|
|
|
|
|
|
|
|
|
- **全连接层转换公式**:
|
|
|
|
|
|
$$
|
|
|
|
|
|
\hat{y}_i = W_{\text{fc}} \cdot h_t + b_{\text{fc}}
|
|
|
|
|
|
$$
|
|
|
|
|
|
|
|
|
|
|
|
其中,假设预测的是二维坐标(例如 $x$ 和 $y$ 坐标),$W_{\text{fc}} \in \mathbb{R}^{2 \times d''}$,输出 $\hat{y}_i \in \mathbb{R}^2$ 表示节点 $i$ 在未来某个时刻(或下一时刻)的预测坐标。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
若整个网络有 $N$ 个节点,则最终预测结果的输出维度为 $N \times 2$(或 $N \times T' \times 2$,如果预测多个未来时刻)。
|
|
|
|
|
|
|
2025-04-15 12:46:07 +08:00
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
### 疑问
|
|
|
|
|
|
|
|
|
|
|
|
该论文可能有点问题,每个节点只能预测自身未来位置,无法获取全局位置信息。如果先LSTM后GCN可能可以!
|
|
|
|
|
|
|