16 KiB
卡尔曼滤波
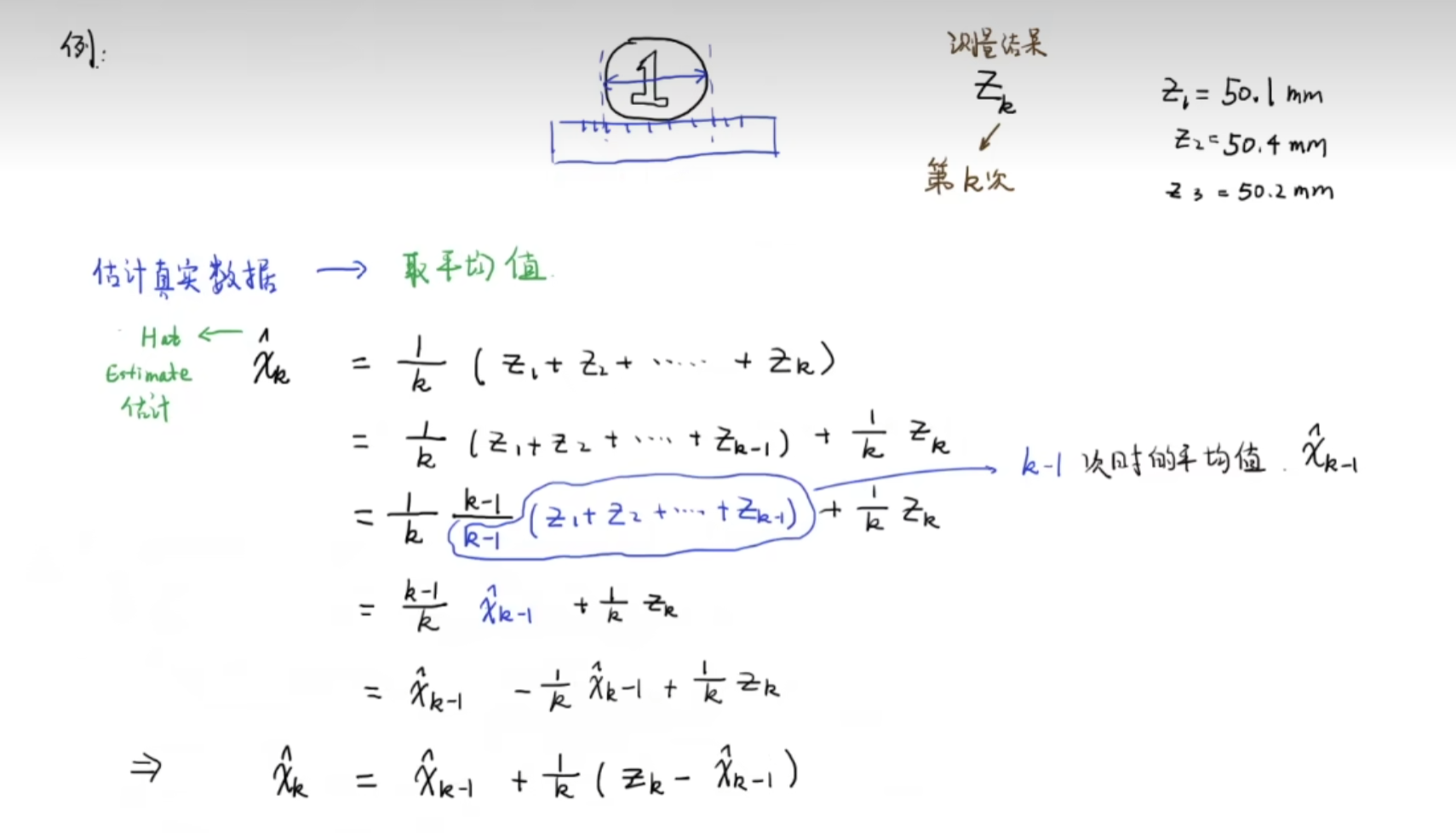
卡尔曼滤波(Kalman Filter)是一种用于线性动态系统状态估计的递归最优滤波算法,它在噪声环境下对系统状态进行估计,并常用于目标跟踪、导航和控制等领域。
卡尔曼滤波假设系统可以用状态空间模型描述,模型包括两个部分:
- 状态转移模型:描述系统状态如何从上一时刻转移到当前时刻。
- 测量模型:描述通过传感器获得的测量值与系统状态之间的关系。
这两个模型中均包含随机噪声,分别记为过程噪声和测量噪声。卡尔曼滤波的目标就是在已知这些噪声统计特性的前提下,利用当前和过去的测量值来对系统状态进行最优估计。
引入
公式
状态转移模型
设系统的状态向量为 $\mathbf{x}_k$,控制输入为 $\mathbf{u}_k$,过程噪声为 $\mathbf{w}_k$(假设均值为0,协方差矩阵为 $\mathbf{Q}$,维度和状态向量一致),状态转移模型可写为:
\mathbf{x}_k = \mathbf{A} \mathbf{x}_{k-1} + \mathbf{B} \mathbf{u}_{k-1} + \mathbf{w}_{k-1}
其中:
\mathbf{A}是状态转移矩阵,\mathbf{B}是控制输入矩阵。
测量模型
设测量向量为 $\mathbf{z}_k$,测量噪声为 $\mathbf{v}_k$(假设均值为0,协方差矩阵为 $\mathbf{R}$),测量模型为:
\mathbf{z}_k = \mathbf{H} \mathbf{x}_k + \mathbf{v}_k
其中:
\mathbf{H}是测量矩阵。
这里是真实状态、真实测量、过程噪声、测量噪声。在卡尔曼滤波的预测和更新阶段中,只需在每个时刻把新测得的 z_k (再加上可用的控制输入 $u_{k-1}$)喂进去,滤波器就会自动递推状态估计。
递归过程
卡尔曼滤波的递归过程主要分为两大步:预测(Prediction) 和 更新(Update)。
注意:$\hat{\mathbf{x}}_k^-$右上角的'-'符号是区分预测状态和更新后的状态。
预测步骤
-
状态预测:
利用系统的状态转移模型,将上一次的状态估计
\hat{\mathbf{x}}_{k-1}通过转移矩阵 $\mathbf{A}$(和控制输入 $\mathbf{B} \mathbf{u}_{k-1}$)预测到当前时刻的状态:\hat{\mathbf{x}}_k^- = \mathbf{A} \hat{\mathbf{x}}_{k-1} + \mathbf{B} \mathbf{u}_{k-1}这里
\hat{\mathbf{x}}_k^-称为先验状态估计,它反映了系统在没有新测量数据情况下的预期状态。 -
协方差预测: 同时,将上一次状态的不确定性(协方差矩阵 $\mathbf{P}_{k-1}$)传播到当前时刻,并加上过程噪声
\mathbf{Q}的影响:\mathbf{P}_k^- = \mathbf{A} \mathbf{P}_{k-1} \mathbf{A}^\mathrm{T} + \mathbf{Q}这个预测协方差反映了预测状态的置信程度,不确定性通常会因过程噪声的加入而增大。
更新步骤
当时刻 k 新的测量值 \mathbf{z}_k 到达时,我们使用它来校正预测结果。
-
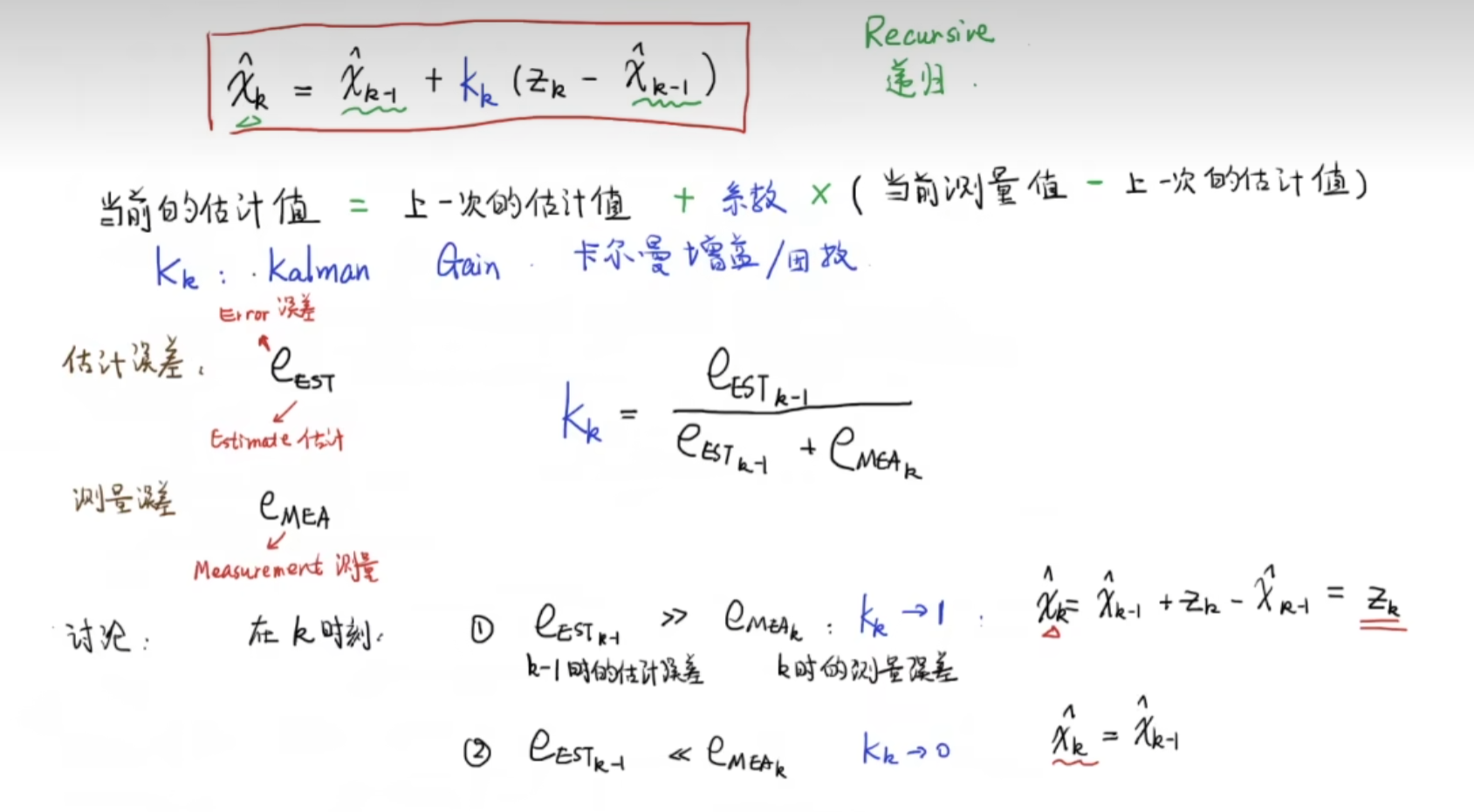
卡尔曼增益的计算: 卡尔曼增益
\mathbf{K}_k衡量了预测的不确定性与测量不确定性之间的权衡。计算公式为:\mathbf{K}_k = \mathbf{P}_k^- \mathbf{H}^\mathrm{T} \left(\mathbf{H} \mathbf{P}_k^- \mathbf{H}^\mathrm{T} + \mathbf{R}\right)^{-1}当预测的置信度较低($\mathbf{P}_k^-$较大)时,卡尔曼增益较大,说明更多地信任测量值;反之,则更多地依赖预测值。
-
状态更新: 根据卡尔曼增益修正先验状态,将测量的偏差信息(即测量值与预测值之间的差异,也叫创新)加权融合:
\hat{\mathbf{x}}_k = \hat{\mathbf{x}}_k^- + \mathbf{K}_k \left(\mathbf{z}_k - \mathbf{H} \hat{\mathbf{x}}_k^- \right)这个更新后的状态
\hat{\mathbf{x}}_k就是当前时刻的后验状态估计,它综合了预测和测量两方面的信息。 -
协方差更新: 更新后的协方差表示在新的测量信息下的不确定性:
\mathbf{P}_k = (\mathbf{I} - \mathbf{K}_k \mathbf{H}) \mathbf{P}_k^-一般来说,经过更新后,状态的不确定性会降低(即协方差矩阵的数值减小)。
疑问:
状态转移模型:为什么包含噪声?
状态转移模型描述的是系统状态的真实动态行为,它是一个理论模型,表示状态如何从 \mathbf{x}_{k-1} 演化到 $\mathbf{x}k$。由于现实系统存在不确定性(如建模误差、外部扰动等),这些无法精确建模的部分被抽象为**过程噪声 $\mathbf{w}{k-1}$**。因此,模型写作:
\mathbf{x}_k = \mathbf{A} \mathbf{x}_{k-1} + \mathbf{B} \mathbf{u}_{k-1} + \mathbf{w}_{k-1}
状态预测:为什么不带噪声?
在卡尔曼滤波的预测步骤中,我们计算的是状态的期望值(即最优估计),而非真实状态本身。由于噪声 \mathbf{w}_{k-1} 的均值为零,它在预测时的期望贡献为零:
\mathbb{E}[\mathbf{x}_k] = \mathbf{A} \mathbb{E}[\mathbf{x}_{k-1}] + \mathbf{B} \mathbf{u}_{k-1} + \mathbb{E}[\mathbf{w}_{k-1}] = \mathbf{A} \hat{\mathbf{x}}_{k-1} + \mathbf{B} \mathbf{u}_{k-1}
协方差预测:噪声的体现
虽然噪声的均值在状态预测中被忽略,但其随机性会导致不确定性累积。因此,协方差预测公式中显式加入了 $\mathbf{Q}$:
\mathbf{P}_k^- = \mathbf{A} \mathbf{P}_{k-1} \mathbf{A}^\mathrm{T} + \mathbf{Q}
扩展卡尔曼滤波
扩展卡尔曼滤波(Extended Kalman Filter,简称 EKF)是一种针对非线性系统状态估计问题的滤波方法。传统的卡尔曼滤波要求系统的状态转移和观测模型都是线性的,而在实际问题中,很多系统往往存在非线性特性。
EKF 的核心思想就是对非线性模型进行局部线性化,然后在线性化后的模型上直接套用标准卡尔曼滤波(KF)的预测和更新公式。
-
非线性系统模型
假设系统的状态转移和观测模型为非线性的:-
状态转移模型:
\mathbf{x}_k = f(\mathbf{x}_{k-1}, \mathbf{u}_{k-1}) + \mathbf{w}_{k-1} -
观测模型:
\mathbf{z}_k = h(\mathbf{x}_k) + \mathbf{v}_k其中,
f(\cdot)和h(\cdot)为非线性函数,\mathbf{w}_{k-1}和\mathbf{v}_k分别表示过程噪声和测量噪声(均假设为零均值高斯噪声)。
-
-
线性化
为了使用卡尔曼滤波方法,扩展卡尔曼滤波需要对非线性函数进行局部线性化。具体做法是使用泰勒展开在当前状态估计附近进行一阶近似,计算函数的雅可比矩阵:-
状态转移函数
f的雅可比矩阵:F_k = \left.\frac{\partial f}{\partial \mathbf{x}}\right|_{\mathbf{x}=\hat{\mathbf{x}}_{k-1}, \mathbf{u}=\mathbf{u}_{k-1}} -
观测函数
h的雅可比矩阵:H_k = \left.\frac{\partial h}{\partial \mathbf{x}}\right|_{\mathbf{x}=\hat{\mathbf{x}}_k^-}
-
-
滤波过程
扩展卡尔曼滤波的递归过程与标准卡尔曼滤波类似,但在每一步都需要用雅可比矩阵替换原来的线性模型矩阵:-
预测步骤:
-
状态预测:
\hat{\mathbf{x}}_k^- = f(\hat{\mathbf{x}}_{k-1}, \mathbf{u}_{k-1}) -
协方差预测:
\mathbf{P}_k^- = F_k \mathbf{P}_{k-1} F_k^\mathrm{T} + \mathbf{Q}这里
F_k是在\hat{\mathbf{x}}_{k-1}处计算得到的雅可比矩阵。
-
-
更新步骤:
-
计算卡尔曼增益:
\mathbf{K}_k = \mathbf{P}_k^- H_k^\mathrm{T} \left(H_k \mathbf{P}_k^- H_k^\mathrm{T} + \mathbf{R}\right)^{-1} -
状态更新:
\hat{\mathbf{x}}_k = \hat{\mathbf{x}}_k^- + \mathbf{K}_k \left(\mathbf{z}_k - h(\hat{\mathbf{x}}_k^-)\right) -
协方差更新:
\mathbf{P}_k = (\mathbf{I} - \mathbf{K}_k H_k) \mathbf{P}_k^-
-
-
通过这样的线性化步骤,EKF 能够对非线性系统进行状态估计,虽然由于线性化近似可能带来一定误差,但在大多数情况下能达到较好的效果。
雅各比矩阵定义
雅可比矩阵(Jacobian Matrix)是一个多变量函数各个分量对各个变量的偏导数组成的矩阵。它反映了在某一点处函数的局部线性化近似,也就是该函数在这一点的“导数”信息。在扩展卡尔曼滤波中,为了对非线性状态转移函数 f(\mathbf{x}, \mathbf{u}) 或观测函数 h(\mathbf{x}) 进行线性化,我们需要计算它们在当前估计点的雅可比矩阵。
示例 1:状态转移函数的雅可比矩阵
假设系统的状态为 $\mathbf{x} = \begin{bmatrix} x_1 \ x_2 \end{bmatrix}$(例如,x_1 表示位置,x_2 表示速度),状态转移函数定义为:
f(\mathbf{x}) =
\begin{bmatrix}
f_1(x_1, x_2) \\
f_2(x_1, x_2)
\end{bmatrix}
=
\begin{bmatrix}
x_1 + x_2 + 0.1 x_1^2 \\
x_2 + 0.05 x_1
\end{bmatrix}
这里函数中的非线性项为 0.1 x_1^2 和 $0.05 x_1$。
求雅可比矩阵
雅可比矩阵 F 是一个 2 \times 2 矩阵,其中每个元素为:
F_{ij} = \frac{\partial f_i}{\partial x_j}
计算各个偏导数:
-
对 $f_1(x_1, x_2) = x_1 + x_2 + 0.1 x_1^2$:
\frac{\partial f_1}{\partial x_1} = 1 + 0.2x_1\frac{\partial f_1}{\partial x_2} = 1
-
对 $f_2(x_1, x_2) = x_2 + 0.05 x_1$:
\frac{\partial f_2}{\partial x_1} = 0.05\frac{\partial f_2}{\partial x_2} = 1
因此,雅可比矩阵为:
F = \begin{bmatrix}
1 + 0.2x_1 & 1 \\
0.05 & 1
\end{bmatrix}
示例 2:观测函数的雅可比矩阵
假设观测函数为:
h(\mathbf{x}) =
\begin{bmatrix}
h_1(x_1, x_2) \\
h_2(x_1, x_2)
\end{bmatrix}
=
\begin{bmatrix}
\sqrt{x_1} \\
x_2
\end{bmatrix}
这里假设传感器对位置进行非线性测量(取平方根),而速度直接测量。
求雅可比矩阵
计算各个偏导数:
-
对 $h_1(x_1, x_2) = \sqrt{x_1}$:
\frac{\partial h_1}{\partial x_1} = \frac{1}{2\sqrt{x_1}}- $\frac{\partial h_1}{\partial x_2} = 0$(因为
h_1与x_2无关)
-
对 $h_2(x_1, x_2) = x_2$:
\frac{\partial h_2}{\partial x_1} = 0\frac{\partial h_2}{\partial x_2} = 1
因此,雅可比矩阵为:
H = \begin{bmatrix}
\frac{1}{2\sqrt{x_1}} & 0 \\
0 & 1
\end{bmatrix}
无迹卡尔曼(UKF)
UKF 具体步骤(分步解析)
| 符号 | 含义 | 维度 |
|---|---|---|
\mathbf{x} |
系统状态向量 | n \times 1 |
P |
状态协方差矩阵 | n \times n |
\mathbf{z} |
观测向量 | m \times 1 |
f(\cdot) |
非线性状态转移函数 | - |
h(\cdot) |
非线性观测函数 | - |
Q |
过程噪声协方差 | n \times n |
R |
观测噪声协方差 | m \times m |
\mathcal{X} |
Sigma点集合 | n \times (2n+1) |
W^{(m)} |
均值权重 | 1 \times (2n+1) |
W^{(c)} |
协方差权重 | 1 \times (2n+1) |
\alpha, \beta, \kappa |
UKF调参参数(控制Sigma点分布) | 标量 |
建模:
x_k = f(x_{k-1}) + w_k
y_k = h\left(x_k\right) + v_k
Step 1: 生成Sigma点(确定性采样)
目的:根据当前状态均值和协方差,生成一组代表状态分布的采样点。
公式:
\begin{aligned}
\mathcal{X}_0 &= \hat{\mathbf{x}}_{k-1|k-1} \\
\mathcal{X}_i &= \hat{\mathbf{x}}_{k-1|k-1} + \left( \sqrt{(n+\lambda) P_{k-1|k-1}} \right)_i \quad (i=1,\dots,n) \\
\mathcal{X}_{i+n} &= \hat{\mathbf{x}}_{k-1|k-1} - \left( \sqrt{(n+\lambda) P_{k-1|k-1}} \right)_i \quad (i=1,\dots,n)
\end{aligned}
符号说明:
- $ \sqrt{(n+\lambda) P} $:协方差矩阵的平方根(如Cholesky分解)。
\left( \sqrt{(n+\lambda) P} \right)_i表示平方根矩阵的第i列。- $ \lambda = \alpha^2 (n + \kappa) - n
:缩放因子(\alpha控制分布范围,通常取1e-3;\kappa $通常取0)。 - 为什么是
2n+1个点?1个中心点 + $ 2n $个对称点,覆盖状态空间的主要方向。
示例:
假设状态 $ \mathbf{x} = [x, y]^T , n = 2 , P = \begin{bmatrix} 4 & 0 \ 0 & 1 \end{bmatrix} , \lambda = 0 $:
-
计算平方根矩阵(Cholesky分解):
\sqrt{(n+\lambda) P} = \sqrt{2} \cdot \begin{bmatrix} 2 & 0 \\ 0 & 1 \end{bmatrix} = \begin{bmatrix} 2.828 & 0 \\ 0 & 1.414 \end{bmatrix} -
生成 Sigma 点:
\begin{aligned} \mathcal{X}_0 &= \hat{\mathbf{x}} \\ \mathcal{X}_1 &= \hat{\mathbf{x}} + [2.828, 0]^T = [\hat{x} + 2.828, \hat{y}] \\ \mathcal{X}_2 &= \hat{\mathbf{x}} + [0, 1.414]^T = [\hat{x}, \hat{y} + 1.414] \\ \mathcal{X}_3 &= \hat{\mathbf{x}} - [2.828, 0]^T = [\hat{x} - 2.828, \hat{y}] \\ \mathcal{X}_4 &= \hat{\mathbf{x}} - [0, 1.414]^T = [\hat{x}, \hat{y} - 1.414] \\ \end{aligned}
Step 2: 计算Sigma点权重
目的:为每个Sigma点分配权重,用于后续计算均值和协方差。
公式:
\begin{aligned}
W_0^{(m)} &= \frac{\lambda}{n + \lambda} \quad &\text{(中心点均值权重)} \\
W_0^{(c)} &= \frac{\lambda}{n + \lambda} + (1 - \alpha^2 + \beta) \quad &\text{(中心点协方差权重)} \\
W_i^{(m)} = W_i^{(c)} &= \frac{1}{2(n + \lambda)} \quad (i=1,\dots,2n) \quad &\text{(对称点权重)}
\end{aligned}
符号说明:
- $ \beta $:高阶矩调节参数(高斯分布时取2最优)。
- 权重作用:中心点通常权重较大,对称点权重均等。
Step 3: 预测步骤(时间更新)
目的:将Sigma点通过非线性状态方程传播,计算预测状态和协方差。
子步骤:
-
传播Sigma点:
\mathcal{X}_{i,k|k-1}^* = f(\mathcal{X}_{i,k-1}, \mathbf{u}_{k-1}), \quad i=0,1,...,2n(每个Sigma点独立通过
f(\cdot)计算) -
计算预测均值和协方差:
\hat{\mathbf{x}}_{k|k-1} = \sum_{i=0}^{2n} W_i^{(m)} \mathcal{X}_{i,k|k-1}^*P_{k|k-1} = \sum_{i=0}^{2n} W_i^{(c)} \left( \mathcal{X}_{i,k|k-1}^* - \hat{\mathbf{x}}_{k|k-1} \right) \left( \mathcal{X}_{i,k|k-1}^* - \hat{\mathbf{x}}_{k|k-1} \right)^T + Q_k符号说明:
-
$\mathcal{X}_{k-1}$:上一时刻生成的Sigma点集合($2n+1$个点)
-
$\mathcal{X}_{k|k-1}^*$:通过状态方程传播后的Sigma点集合
-
$ Q_k $:过程噪声(表示模型不确定性)。
-
Step 4: 观测更新(测量更新)
目的:将预测的Sigma点通过观测方程传播,计算卡尔曼增益并更新状态。
子步骤:
-
生成观测Sigma点:
\mathcal{Z}_{i,k|k-1} = h(\mathcal{X}_{i,k|k-1}^*), \quad i=0,...,2n -
计算观测预测统计量:
\hat{\mathbf{z}}_{k|k-1} = \sum_{i=0}^{2n} W_i^{(m)} \mathcal{Z}_{i,k|k-1}P_{z_k z_k} = \sum_{i=0}^{2n} W_i^{(c)} \left( \mathcal{Z}_{i,k|k-1} - \hat{\mathbf{z}}_{k|k-1} \right) \left( \mathcal{Z}_{i,k|k-1} - \hat{\mathbf{z}}_{k|k-1} \right)^T + R_kP_{x_k z_k} = \sum_{i=0}^{2n} W_i^{(c)} \left( \mathcal{X}_{i,k|k-1}^* - \hat{\mathbf{x}}_{k|k-1} \right) \left( \mathcal{Z}_{i,k|k-1} - \hat{\mathbf{z}}_{k|k-1} \right)^T符号说明:
- $ P_{z_k z_k}
:观测自协方差(含噪声R_k $)。 - $ P_{x_k z_k} $:状态-观测互协方差。
- $ P_{z_k z_k}
-
计算卡尔曼增益和更新状态:
K_k = P_{x_k z_k} P_{z_k z_k}^{-1}\hat{\mathbf{x}}_{k|k} = \hat{\mathbf{x}}_{k|k-1} + K_k (\mathbf{z}_k - \hat{\mathbf{z}}_{k|k-1})P_{k|k} = P_{k|k-1} - K_k P_{z_k z_k} K_k^T