471 lines
16 KiB
Markdown
471 lines
16 KiB
Markdown
李振河 陈茂森
|
||
|
||
# 图神经网络
|
||
|
||
图表示学习的本质是把节点映射成低维连续稠密的向量。这些向量通常被称为 **嵌入(Embedding)**,它们能够捕捉节点在图中的结构信息和属性信息,从而用于下游任务(如节点分类、链接预测、图分类等)。
|
||
|
||
- **低维**:将高维的原始数据(如邻接矩阵或节点特征)压缩为低维向量,减少计算和存储开销。
|
||
- **连续**:将离散的节点或图结构映射为连续的向量空间,便于数学运算和捕捉相似性。
|
||
- **稠密**:将稀疏的原始数据转换为稠密的向量,每个维度都包含有意义的信息。
|
||
|
||
|
||
|
||
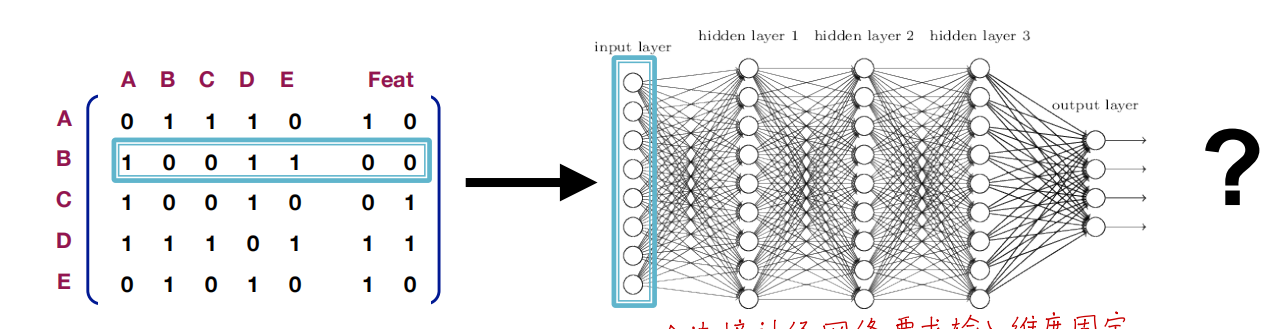
## 对图数据进行深度学习的“朴素做法”
|
||
|
||
把图的邻接矩阵和节点特征“直接拼接”成固定维度的输入,然后将其送入一个深度神经网络(全连接层)进行学习。
|
||
|
||
|
||
|
||
这种做法面临重大问题,导致其**并不可行**:
|
||
|
||
1. $O(|V|^2)$ 参数量 ,参数量庞大
|
||
|
||
2. 无法适应不同大小的图 ,需要固定输入维度
|
||
|
||
3. 对节点顺序敏感 ,节点编号顺序一变,输入就完全变样,但其实图的拓扑并没变(仅节点编号/排列方式不同)。
|
||
|
||
```text
|
||
A —— B
|
||
| |
|
||
D —— C
|
||
```
|
||
|
||
*矩阵 1*(顺序 $[A,B,C,D]$):
|
||
$$
|
||
M_1 =
|
||
\begin{pmatrix}
|
||
0 & 1 & 0 & 1\\
|
||
1 & 0 & 1 & 0\\
|
||
0 & 1 & 0 & 1\\
|
||
1 & 0 & 1 & 0
|
||
\end{pmatrix}.
|
||
$$
|
||
*矩阵 2*(顺序 $[C,A,D,B]$):
|
||
$$
|
||
M_2 =
|
||
\begin{pmatrix}
|
||
0 & 0 & 1 & 1 \\
|
||
0 & 0 & 1 & 1 \\
|
||
1 & 1 & 0 & 0 \\
|
||
1 & 1 & 0 & 0
|
||
\end{pmatrix}.
|
||
$$
|
||
|
||
两个矩阵完全不同,但**它们对应的图是相同的**(只不过节点的顺序改了)。
|
||
|
||
|
||
|
||
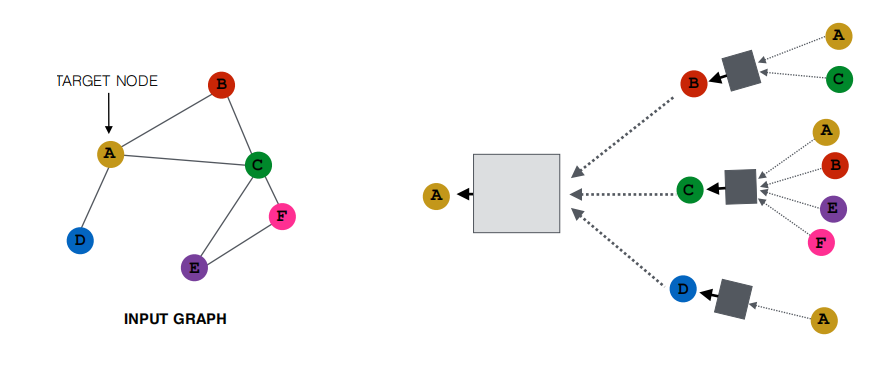
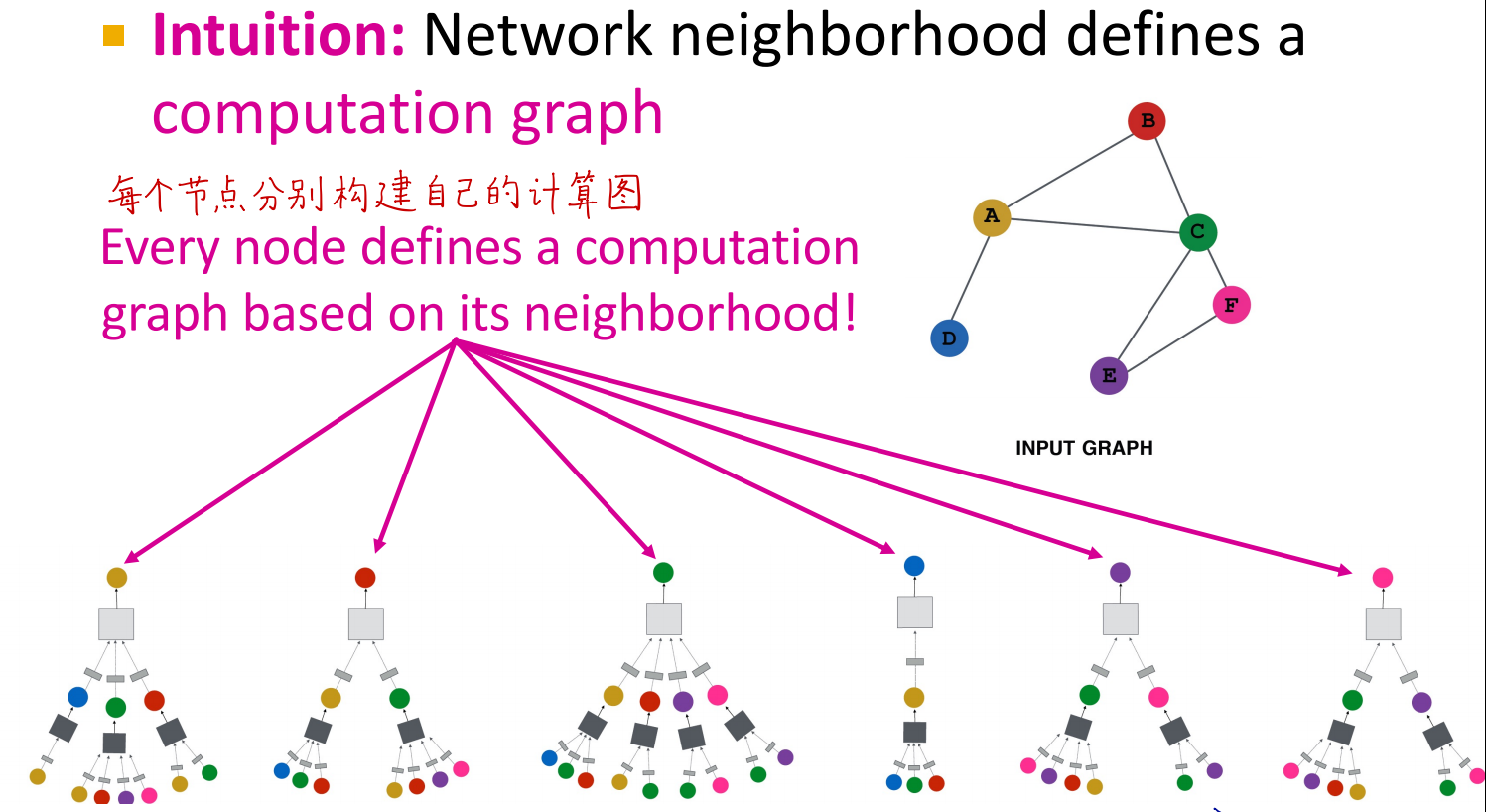
## 计算图
|
||
|
||
在**图神经网络**里,通常每个节点$v$ 都有一个**局部计算图**,用来表示该节点在聚合信息时所需的所有邻居(及邻居的邻居……)的依赖关系。
|
||
|
||
直观理解
|
||
- 以节点 $v$ 为根;
|
||
- 1-hop 邻居在第一层,2-hop 邻居在第二层……
|
||
- 逐层展开直到一定深度(例如 k 层)。
|
||
- 这样形成一棵“邻域树”或“展开图”,其中每个节点都需要从其子节点(邻居)获取特征进行聚合。
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
|
||
### 例子
|
||
|
||
在图神经网络中,每一层的计算通常包括以下步骤:
|
||
|
||
1. **聚合(Aggregation)**:将邻居节点的特征聚合起来(如求和、均值、最大值等)。
|
||
2. **变换(Transformation)**:将聚合后的特征通过一个神经网络(如 MLP)进行非线性变换。
|
||
|
||
```text
|
||
A
|
||
|
|
||
B
|
||
/ \
|
||
C D
|
||
```
|
||
|
||
假设每个节点的特征是一个二维向量:
|
||
|
||
- 节点 $ A $ 的特征:$ h_A = [1.0, 0.5] $
|
||
- 节点 $ B $ 的特征:$ h_B = [0.8, 1.2] $
|
||
- 节点 $ C $ 的特征:$ h_C = [0.3, 0.7] $
|
||
- 节点 $ D $ 的特征:$ h_D = [1.5, 0.9] $
|
||
|
||
**第 1 层更新:$A^{(0)} \to A^{(1)}$**
|
||
|
||
1. 节点 $A$ 的 1-hop 邻居:只有 $B$。
|
||
|
||
2. 聚合(示例:自+邻居取平均):
|
||
$$
|
||
z_A^{(1)} = \frac{A^{(0)} + B^{(0)}}{2} = \frac{[1.0,\,0.5] + [0.8,\,1.2]}{2} = \frac{[1.8,\,1.7]}{2} = [0.9,\,0.85].
|
||
$$
|
||
|
||
3. MLP 变换:用一个MLP映射 $z_A^{(1)}$ 到 2 维输出:
|
||
$$
|
||
A^{(1)} \;=\; \mathrm{MLP_1}\bigl(z_A^{(1)}\bigr).
|
||
$$
|
||
|
||
- (数值略,可想象 $\mathrm{MLP}([0.9,0.85]) \approx [1.0,0.6]$ 之类。)
|
||
|
||
**结果**:$A^{(1)}$ 包含了 **A** 的初始特征 + **B** 的初始特征信息。
|
||
|
||
---
|
||
|
||
**第 2 层更新:$A^{(1)} \to A^{(2)}$**
|
||
|
||
为了让 **A** 获得 **2-hop** 范围($C, D$)的信息,需要先让 $B$ 在第 1 层就吸收了 $C, D$ 的特征,从而 **$B^{(1)}$** 蕴含 $C, D$ 信息。然后 **A** 在第 2 层再从 **$B^{(1)}$** 聚合。
|
||
|
||
1. **节点 B 在第 1 层**(简要说明)
|
||
|
||
- 邻居:$\{A,C,D\}$
|
||
- 聚合:$z_B^{(1)} = \frac{B^{(0)} + A^{(0)} + C^{(0)} + D^{(0)}}{4} = \frac{[0.8,\,1.2] + [1.0,\,0.5] + [0.3,\,0.7] + [1.5,\,0.9]}{4} = \frac{[3.6,\,3.3]}{4} = [0.9,\,0.825].$
|
||
- MLP 变换:$B^{(1)} = \mathrm{MLP}\bigl(z_B^{(1)}\bigr)$。
|
||
- 此时 **$B^{(1)}$** 已经包含了 $C, D$ 的信息。
|
||
|
||
2. **节点 $A$ 的第 2 层聚合**
|
||
|
||
- 邻居:$B$,但此时要用 **$B^{(1)}$**(它已吸收 C、D)
|
||
|
||
- 聚合:
|
||
$$
|
||
z_A^{(2)} = A^{(1)} + B^{(1)}.
|
||
$$
|
||
|
||
- MLP 变换:
|
||
$$
|
||
A^{(2)} = \mathrm{MLP_2}\bigl(z_A^{(2)}\bigr).
|
||
$$
|
||
|
||
**结果**:$A^{(2)}$ 就包含了 **2-hop** 范围的信息,因为 **$B^{(1)}$** 中有 $C, D$ 的贡献。
|
||
|
||
|
||
|
||
**GNN 的层数**就是**节点聚合邻居信息的迭代次数**(也是计算图的层数)。
|
||
|
||
同一层里,**所有节点共享一组参数**(同一个 MLP 或全连接神经网络)
|
||
|
||
|
||
|
||
### **矩阵运算**
|
||
|
||
$\tilde D^{-1}\,\tilde A\,\tilde D^{-1}H$
|
||
|
||
$H'=\tilde D^{-1}\,\tilde A\,H$
|
||
|
||
A
|
||
|
|
||
B
|
||
/ \
|
||
C D
|
||
**1.构造矩阵**
|
||
|
||
含自环邻接矩阵 $\tilde A=A+I$
|
||
$$
|
||
\tilde A =
|
||
\begin{bmatrix}
|
||
1 & 1 & 0 & 0\\
|
||
1 & 1 & 1 & 1\\
|
||
0 & 1 & 1 & 0\\
|
||
0 & 1 & 0 & 1
|
||
\end{bmatrix}
|
||
$$
|
||
度矩阵 $\tilde D$(对角=自身+邻居数量)
|
||
$$
|
||
\tilde D = \mathrm{diag}(2,\,4,\,2,\,2)
|
||
$$
|
||
特征矩阵 $H$(每行为一个节点的特征向量)
|
||
$$
|
||
H =
|
||
\begin{bmatrix}
|
||
1.0 & 0.5\\
|
||
0.8 & 1.2\\
|
||
0.3 & 0.7\\
|
||
1.5 & 0.9
|
||
\end{bmatrix}
|
||
$$
|
||
**2.计算**
|
||
|
||
求和: $\tilde A\,H$
|
||
$$
|
||
\tilde A H =
|
||
\begin{bmatrix}
|
||
1.8 & 1.7\\
|
||
3.6 & 3.3\\
|
||
1.1 & 1.9\\
|
||
2.3 & 2.1
|
||
\end{bmatrix}
|
||
$$
|
||
平均: $\tilde D^{-1}(\tilde A H)$
|
||
$$
|
||
\tilde D^{-1}\tilde A H =
|
||
\begin{bmatrix}
|
||
0.90 & 0.85\\
|
||
0.90 & 0.825\\
|
||
0.55 & 0.95\\
|
||
1.15 & 1.05
|
||
\end{bmatrix}
|
||
$$
|
||
|
||
|
||
## GCN
|
||
|
||
在 GCN 里,归一化(normalization)的核心目的就是 **平衡不同节点在信息传播(message‑passing)中的影响力**,避免「高连通度节点(high‑degree nodes)」主导了所有邻居的特征聚合。
|
||
|
||
$H' = \tilde D^{-1}\,\tilde A\,\tilde D^{-1}H$
|
||
|
||
- 对节点 $i$ 来说:
|
||
|
||
$$
|
||
H'_i = \frac1{d_i}\sum_{j\in \mathcal N(i)}\frac1{d_j}\,H_j
|
||
$$
|
||
|
||
- **先用源节点 $j$ 的度 $d_j$ 缩小它的特征贡献**,再用目标节点 $i$ 的度 $d_i$ 归一化总和。
|
||
|
||
|
||
|
||
### **GCN中实际的公式:**
|
||
|
||
$$
|
||
H^{(l+1)} = \sigma\Big(\tilde{D}^{-1/2}\tilde{A}\tilde{D}^{-1/2}H^{(l)}W^{(l)}\Big)
|
||
$$
|
||
|
||
其中:
|
||
|
||
- $H^{(l)}$ 是第 $l$ 层的输入特征(对第 $0$ 层来说就是节点的初始特征),
|
||
- $W^{(l)}$ 是第 $l$ 层的可训练权重矩阵,相当于一个简单的线性变换(类似于 MLP 中的全连接层),
|
||
- $\sigma(\cdot)$ 是非线性激活函数(例如 ReLU),
|
||
- $\tilde{A}$ 是包含自连接的邻接矩阵,
|
||
- $\tilde{D}$ 是 $\tilde{A}$ 的度矩阵。
|
||
|
||
|
||
|
||
**$\tilde{D}^{-1/2}\tilde{A}\tilde{D}^{-1/2}$的优势**
|
||
|
||
**1.对称归一化**:$\tilde D^{-\frac{1}{2}}\,\tilde A\,\tilde D^{-\frac{1}{2}}$ 是一个对称矩阵,这意味着信息在节点之间的传播是双向一致的。这种对称性特别适合无向图,因为无向图的邻接矩阵 $\tilde A$ 本身就是对称的。
|
||
|
||
**2.适度抑制高连通度节点**:对称平方根归一化通过 $\tilde D^{-\frac{1}{2}}$ 对源节点和目标节点同时进行归一化,能够适度抑制高连通度节点的特征贡献,而不会过度削弱其影响力。
|
||
|
||
**3.谱半径控制**:对称平方根归一化后的传播矩阵 $\tilde D^{-\frac{1}{2}}\,\tilde A\,\tilde D^{-\frac{1}{2}}$ 的谱半径(最大特征值)被控制在 $[0, 1]$ 范围内,这有助于保证模型的数值稳定性。
|
||
|
||
**4.归一化拉普拉斯矩阵**:对称平方根归一化的传播矩阵 $\tilde D^{-\frac{1}{2}}\,\tilde A\,\tilde D^{-\frac{1}{2}}$ 与归一化拉普拉斯矩阵 $L = I - \tilde D^{-\frac{1}{2}}\,\tilde A\,\tilde D^{-\frac{1}{2}}$ 有直接联系。归一化拉普拉斯矩阵在图信号处理中具有重要的理论意义,能够更好地描述图的频谱特性。
|
||
|
||
|
||
|
||
**GraphSAGE优化**
|
||
$$
|
||
h_v^{(k+1)} = \sigma \Big(
|
||
\mathbf{W}_{\text{self}}^{(k)} \cdot h_v^{(k)}
|
||
\;+\;
|
||
\mathbf{W}_{\text{neigh}}^{(k)} \cdot \mathrm{MEAN}_{u\in N(v)}\bigl(h_u^{(k)}\bigr)
|
||
\Big),
|
||
$$
|
||
|
||
|
||
|
||
## GAT
|
||
|
||
图注意力网络(GAT)中最核心的运算:**图注意力层**。它的基本思想是:
|
||
|
||
1. **线性变换**:先对每个节点的特征 $\mathbf{h}_i$ 乘上一个可学习的权重矩阵 $W$,得到变换后的特征 $W \mathbf{h}_i$。
|
||
2. **自注意力机制**:通过一个可学习的函数 $a$,对节点 $i$ 和其邻居节点 $j$ 的特征进行计算,得到注意力系数 $e_{ij}$。这里会对邻居进行遮蔽(masked attention),即只计算图中有边连接的节点对。
|
||
3. **归一化**:将注意力系数 $e_{ij}$ 通过 softmax 进行归一化,得到 $\alpha_{ij}$,表示节点 $j$ 对节点 $i$ 的重要性权重。
|
||
4. **聚合**:最后利用注意力系数加权邻居节点的特征向量,并经过激活函数得到新的节点表示 $\mathbf{h}_i'$。
|
||
5. **多头注意力**:为增强表示能力,可并行地执行多个独立的注意力头(multi-head attention),再将它们的结果进行拼接(或在最后一层进行平均),从而得到最终的节点表示。
|
||
|
||
### 注意力系数
|
||
|
||
1. **注意力系数(未归一化)**
|
||
|
||
$$
|
||
e_{ij} = a\bigl(W\mathbf{h}_i,\; W\mathbf{h}_j\bigr)
|
||
$$
|
||
|
||
2. **注意力系数的 softmax 归一化**
|
||
|
||
$$
|
||
\alpha_{ij} = \text{softmax}_j\bigl(e_{ij}\bigr)
|
||
= \frac{\exp\bigl(e_{ij}\bigr)}{\sum_{k \in \mathcal{N}_i} \exp\bigl(e_{ik}\bigr)}
|
||
$$
|
||
|
||
3. **具体的注意力计算形式(以单层前馈网络 + LeakyReLU 为例)**
|
||
|
||
$$
|
||
\alpha_{ij}
|
||
= \frac{\exp\Bigl(\text{LeakyReLU}\bigl(\mathbf{a}^\top \bigl[\;W\mathbf{h}_i \,\|\, W\mathbf{h}_j\bigr]\bigr)\Bigr)}
|
||
{\sum_{k\in \mathcal{N}_i} \exp\Bigl(\text{LeakyReLU}\bigl(\mathbf{a}^\top \bigl[\;W\mathbf{h}_i \,\|\, W\mathbf{h}_k\bigr]\bigr)\Bigr)}
|
||
$$
|
||
|
||
- 其中,$\mathbf{a}$ 为可学习的参数向量,$\|$ 表示向量拼接(concatenation)。
|
||
|
||
**示例假设:**
|
||
|
||
- **节点特征**:
|
||
假设每个节点的特征向量维度为 $F=2$。
|
||
$$
|
||
\mathbf{h}_i = \begin{bmatrix}1 \\ 0\end{bmatrix},\quad
|
||
\mathbf{h}_j = \begin{bmatrix}0 \\ 1\end{bmatrix},\quad
|
||
\mathbf{h}_k = \begin{bmatrix}1 \\ 1\end{bmatrix}.
|
||
$$
|
||
|
||
- **线性变换矩阵 $W$**:
|
||
为了简化,我们令 $W$ 为单位矩阵(即 $W\mathbf{h} = \mathbf{h}$)。
|
||
$$
|
||
W = \begin{bmatrix}1 & 0 \\ 0 & 1\end{bmatrix}.
|
||
$$
|
||
|
||
- **可学习向量 $\mathbf{a}$**:
|
||
假设 $\mathbf{a}$ 为 4 维向量,设
|
||
$$
|
||
\mathbf{a} = \begin{bmatrix}1 \\ 1 \\ 1 \\ 1\end{bmatrix}.
|
||
$$
|
||
|
||
- 激活函数使用 LeakyReLU(负数斜率设为0.2,但本例中结果为正数,所以不变)。
|
||
|
||
---
|
||
|
||
**计算步骤:**
|
||
|
||
1. **计算 $W\mathbf{h}_i$、$W\mathbf{h}_j$ 和 $W\mathbf{h}_k$:**
|
||
$$
|
||
W\mathbf{h}_i = \begin{bmatrix}1 \\ 0\end{bmatrix},\quad
|
||
W\mathbf{h}_j = \begin{bmatrix}0 \\ 1\end{bmatrix}, \quad
|
||
W\mathbf{h}_k = \begin{bmatrix}1 \\ 1\end{bmatrix}
|
||
$$
|
||
|
||
2. **构造拼接向量并计算未归一化的注意力系数 $e_{ij}$ 和 $e_{ik}$:**
|
||
|
||
- 对于邻居 $j$:
|
||
$$
|
||
\bigl[W\mathbf{h}_i \,\|\, W\mathbf{h}_j\bigr] =
|
||
\begin{bmatrix}1 \\ 0 \\ 0 \\ 1\end{bmatrix}.
|
||
$$
|
||
|
||
内积计算:
|
||
$$
|
||
\mathbf{a}^\top \begin{bmatrix}1 \\ 0 \\ 0 \\ 1\end{bmatrix} = 1+0+0+1 = 2.
|
||
$$
|
||
|
||
经过 LeakyReLU(正数保持不变):
|
||
$$
|
||
e_{ij} = 2.
|
||
$$
|
||
|
||
- 对于邻居 $k$,同理得到:
|
||
|
||
$$
|
||
e_{ik} = 3.
|
||
$$
|
||
|
||
3. **计算 softmax 得到归一化注意力系数 $\alpha_{ij}$:**
|
||
$$
|
||
\alpha_{ij} = \frac{\exp(2)}{\exp(2)+\exp(3)} = \frac{e^2}{e^2+e^3}\approx 0.269.
|
||
$$
|
||
|
||
|
||
|
||
同理:
|
||
$$
|
||
\alpha_{ik} = \frac{\exp(3)}{\exp(2)+\exp(3)} \approx 0.731.
|
||
$$
|
||
|
||
|
||
|
||
### 特征聚合
|
||
|
||
**单头注意力聚合(得到新的节点特征)**
|
||
$$
|
||
\mathbf{h}_i' = \sigma\Bigl(\sum_{j \in \mathcal{N}_i} \alpha_{ij} \,W \mathbf{h}_j\Bigr)
|
||
$$
|
||
对$i$ 的邻居节点加权求和,再经过非线性激活函数得到新的特征表示
|
||
|
||
**多头注意力(隐藏层时拼接)**
|
||
|
||
每个头都有自己的一组可学习参数,并独立计算注意力系数和输出特征。以捕捉邻居节点的多种不同关系或特征。
|
||
|
||
如果有 $K$ 个独立的注意力头,每个头输出 $\mathbf{h}_i'^{(k)}$,则拼接后的输出为:
|
||
$$
|
||
\mathbf{h}_i' =
|
||
\big\Vert_{k=1}^K
|
||
\sigma\Bigl(\sum_{j \in \mathcal{N}_i} \alpha_{ij}^{(k)} \, W^{(k)} \mathbf{h}_j\Bigr)
|
||
$$
|
||
其中,$\big\Vert$ 表示向量拼接操作,$\alpha_{ij}^{(k)}$、$W^{(k)}$ 分别为第 $k$ 个注意力头对应的注意力系数和线性变换。
|
||
|
||
例假如:
|
||
$$
|
||
\mathbf{h}_i'^{(1)} = \sigma\left(\begin{bmatrix} 0.6 \\ 0.4 \end{bmatrix}\right)
|
||
= \begin{bmatrix} 0.6 \\ 0.4 \end{bmatrix}. \\
|
||
\mathbf{h}_i'^{(2)} = \sigma\left(\begin{bmatrix} 0.6 \\ 1.4 \end{bmatrix}\right)
|
||
= \begin{bmatrix} 0.6 \\ 1.4 \end{bmatrix}.
|
||
$$
|
||
将两个头的输出在特征维度上进行拼接,得到最终节点 $i$ 的新特征表示:
|
||
$$
|
||
\mathbf{h}_i' = \mathbf{h}_i'^{(1)} \,\Vert\, \mathbf{h}_i'^{(2)}
|
||
= \begin{bmatrix} 0.6 \\ 0.4 \end{bmatrix} \,\Vert\, \begin{bmatrix} 0.6 \\ 1.4 \end{bmatrix}
|
||
= \begin{bmatrix} 0.6 \\ 0.4 \\ 0.6 \\ 1.4 \end{bmatrix}.
|
||
$$
|
||
**多头注意力(输出层时平均)**
|
||
|
||
在最终的输出层(例如分类层)通常会将多个头的结果做平均,而不是拼接:
|
||
$$
|
||
\mathbf{h}_i' =
|
||
\sigma\Bigl(
|
||
\frac{1}{K} \sum_{k=1}^K \sum_{j \in \mathcal{N}_i}
|
||
\alpha_{ij}^{(k)} \, W^{(k)} \mathbf{h}_j
|
||
\Bigr)
|
||
$$
|
||
|
||
|
||
|
||
## 直推式学习与归纳式学习
|
||
|
||
**直推式学习(Transductive Learning)**
|
||
模型直接在固定的训练图上学习节点的表示或标签,结果只能应用于这张图中的节点,无法直接推广到新的、未见过的节点或图。
|
||
|
||
例如:DeepWalk ,它通过对固定图的随机游走生成节点序列来学习节点嵌入,因此只能得到训练图中已有节点的表示,一旦遇到新节点,需要重新训练或进行特殊处理。
|
||
|
||
**注意**:GCN是直推式的,因为它**依赖于整个图的归一化邻接矩阵**进行卷积操作,需要在固定图上训练。
|
||
|
||
|
||
|
||
**归纳式学习(Inductive Learning)**
|
||
模型学习的是一个映射函数或规则,可以将这种规则推广到未见过的**新节点**或**新图**上。这种方法能够处理动态变化的图结构或新的数据。
|
||
|
||
**例如:**
|
||
|
||
图神经网络的变体(GAT)都是归纳式的,因为它们在聚合邻居信息时学习一个共享的函数,该函数能够应用于任意新节点。
|
||
|
||
- 局部计算:GAT 的注意力机制仅在每个节点的局部邻域内计算,不依赖于全局图结构。
|
||
- 参数共享:模型中每一层的参数(如 $W$ 和注意力参数 $\mathbf{a}$)是共享的,可以直接应用于新的、未见过的图。
|
||
|
||
**泛化到新节点**:在许多推荐系统中,如果有新用户加入(新节点),我们需要给他们做个性化推荐,这就要求系统能够在不重新训练整个模型的情况下,为新用户生成表示(Embedding),并且完成推荐预测。
|
||
|
||
**泛化到新图:** 分子图预测。我们会用一批训练分子(每个分子是一张图)来训练一个 GNN 模型,让它学会如何根据图结构与原子特征来预测分子的某些性质(如毒性、溶解度、活性等)。训练完成后,让它在新的分子上做预测。
|
||
|
||
|
||
|
||
## GNN的优点:
|
||
|
||
**参数共享**
|
||
|
||
- 浅层嵌入(如Deepwalk)为每个节点单独学习一个向量,参数量随节点数线性增长。
|
||
- GNN 使用统一的消息传递/聚合函数,所有节点共享同一套模型参数,大幅减少参数量。
|
||
|
||
**归纳式学习**
|
||
|
||
- 浅层方法通常无法直接处理训练时未见过的新节点。
|
||
- GNN 能通过邻居特征和结构来生成新节点的表示,实现对新节点/新图的泛化。
|
||
|
||
**利用节点特征**
|
||
|
||
- 浅层方法多半只基于连接关系(图结构)。
|
||
- GNN 可以直接整合节点的属性(文本、图像特征等),生成更具语义信息的嵌入。
|
||
|
||
**更强的表达能力**
|
||
|
||
- GNN 通过多层聚合邻居信息,可学习到更丰富的高阶结构和特征交互,往往在多种任务上表现更优。
|
||
|